Human-Drone Partnerships for Emergency Response
Fall 2019 - Present
Description
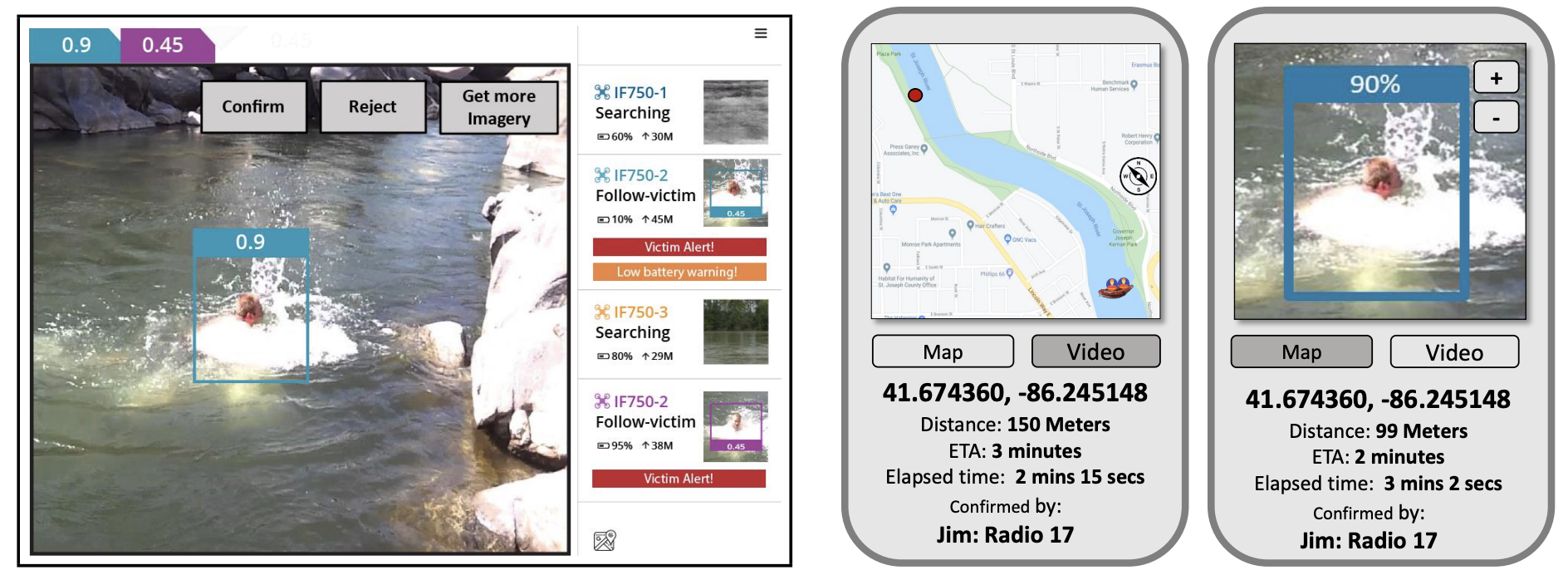
The use of semi-autonomous Unmanned Aerial Vehicles (UAV) to support emergency response scenarios, such as fire surveillance and search and rescue, offers the potential for huge societal benefits. However, designing an effective solution in this complex domain represents a "wicked design" problem, requiring a careful balance between trade-offs associated with drone autonomy versus human control, mission functionality versus safety, and the diverse needs of different stakeholders. This paper focuses on designing for situational awareness (SA) using a scenario-driven, participatory design process. We developed SA cards describing six common design-problems, known as SA demons, and three new demons of importance to our domain. We then used these SA cards to equip domain experts with SA knowledge so that they could more fully engage in the design process. We designed a potentially reusable solution for achieving SA in multi-stakeholder, multi-UAV, emergency response applications.
This work was supported by NSF Award No. CNS-1931962.
Publications
- "Cognition Envelopes for Bounded AI Reasoning in Autonomous UAS Operations,",,,,
,,,Proceedings of the International Conference on AI Engineering (CAIN 2026),April 2026.[pdf][bibtex]@inproceedings{granadeno2025cognition,
title={Cognition Envelopes for Bounded AI Reasoning in Autonomous
UAS Operations},
author={Granadeno, Pedro Antonio Alarcon and
Russell, Arturo Miguel Bernal and
Nelson, Sofia and
Hernandez, Demetrius and
Petterson, Maureen and
Murphy, Michael and
Scheirer, Walter J and
Cleland-Huang, Jane},
booktitle={Proceedings of the International Conference on AI
Engineering (CAIN 2026)},
year={2025}
}
- "Psych-Occlusion: Using Visual Psychophysics for Aerial Detection of,,,
Occluded Persons during Search and Rescue,"Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision
(WACV),March 2025.[pdf][bibtex]@inproceedings{russell2025psych,
title={Psych-Occlusion: Using Visual Psychophysics for Aerial Detection of
Occluded Persons during Search and Rescue},
author={Russell Bernal, Arturo Miguel and
Scheirer, Walter and
Cleland-Huang, Jane},
booktitle={Proceedings of the IEEE/CVF Winter Conference
on Applications of Computer Vision (WACV)},
year={2025}
}
- "NOMAD: A Natural, Occluded, Multi-scale Aerial Dataset, for Emergency Response,,,
Scenarios,"Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision
(WACV),January 2024.[pdf] [dataset][bibtex]@inproceedings{russell2024nomad,
title={NOMAD: A Natural, Occluded, Multi-scale Aerial Dataset,
for Emergency Response Scenarios},
author={Russell Bernal, Arturo Miguel and
Scheirer, Walter and
Cleland-Huang, Jane},
booktitle={Proceedings of the IEEE/CVF Winter Conference
on Applications of Computer Vision (WACV)},
pages={8584--8595},
year={2024}
}
- "Adaptive Autonomy in Human-on-the-Loop Vision-Based Robotics Systems,", , , ,
,, ,
,Workshop on AI Engineering – Software Engineering for AI (WAIN),May 2021.[pdf][bibtex]@inproceedings{Abraham_WAIN2021,
author = {Sophia Abraham and
Zachariah Carmichael and
Sreya Banerjee and
Rosaura G. VidalMata and
Ankit Agrawal and
Md Nafee Al Islam and Walter J. Scheirer and Jane Cleland-Huang},
title = {Adaptive Autonomy in Human-on-the-Loop Vision-Based Robotics Systems},
booktitle = {Workshop on AI Engineering – Software Engineering for AI (WAIN},
year = {2021}
}
- "The Next Generation of Human-Drone Partnerships: Co-Designing an Emergency,, , , ,
Response System,"
, , , , ,
, ,
, ,Proceedings of the ACM CHI Conference on Human Factors in Computing Systems
(Honorable Mention Award),April 2020.[pdf][bibtex]@misc{agrawal2020generation,
title={The Next Generation of Human-Drone Partnerships: Co-Designing an Emergency
Response System},
author={Ankit Agrawal and Sophia Abraham and Benjamin Burger and Chichi Christine
and Luke Fraser and John Hoeksema and Sara Hwang and Elizabeth Travnik and
Shreya Kumar and Walter Scheirer and Jane Cleland-Huang and Michael Vierhauser
and Ryan Bauer and Steve Cox},
year={2020},
eprint={2001.03849},
archivePrefix={arXiv},
primaryClass={cs.HC}
}