Prototypical Part Networks
Summer 2022 - Fall 2024
Description
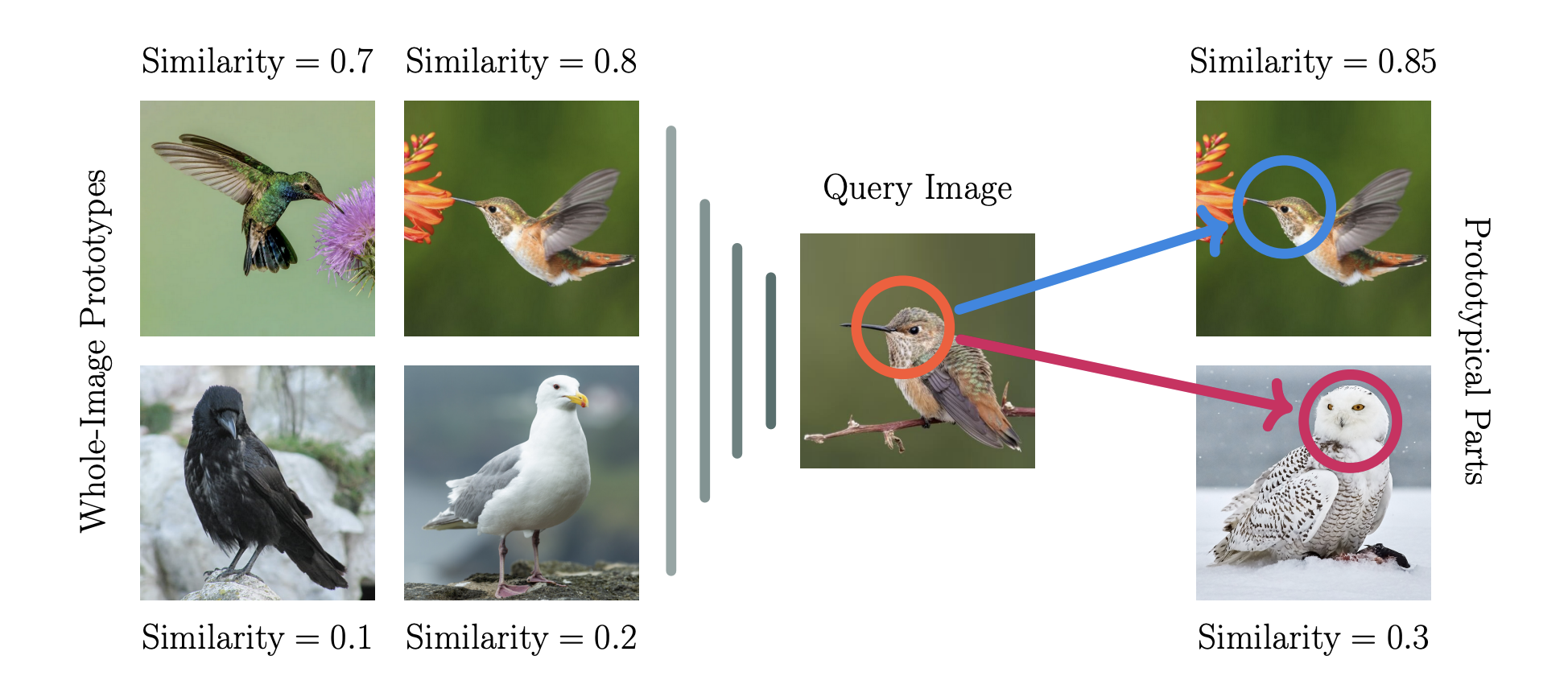
Prototypical part neural networks (ProtoPartNNs), namely PROTOPNET and its derivatives, are an intrinsically interpretable approach to machine learning. Their prototype learning scheme enables intuitive explanations of the form, this (prototype) looks like that (testing image patch). But, does this actually look like that? In this work, we delve into why object part localization and associated heat maps in past work are misleading. Rather than localizing to object parts, existing ProtoPartNNs localize to the entire image, contrary to generated explanatory visualizations. We argue that detraction from these underlying issues is due to the alluring nature of visualizations and an over-reliance on intuition. To alleviate these issues, we devise new receptive field-based architectural constraints for meaningful localization and a principled pixel space mapping for ProtoPartNNs. To improve interpretability, we propose additional architectural improvements, including a simplified classification head. We also make additional corrections to PROTOPNET and its derivatives, such as the use of a validation set, rather than a test set, to evaluate generalization during training. Our approach, PIXPNET (Pixel-grounded Prototypical part Network), is the only ProtoPartNN that truly learns and localizes to prototypical object parts. We demonstrate that PIXPNET achieves quantifiably improved interpretability without sacrificing accuracy1
Going furhter, we combine concept-based neural networks with generative, flow-based classifiers into a novel, intrinsically explainable, exactly invertible approach to supervised learning. Prototypical neural networks represent an exciting way forward in realizing human-comprehensible machine learning without concept annotations, but a human-machine semantic gap continues to haunt current approaches. We find that reliance on indirect interpretation functions for prototypical explanations imposes a severe limit on prototypes' informative power. From this, we posit that invertibly learning prototypes as distributions over the latent space provides more robust, expressive, and interpretable modeling. We propose one such model, called ProtoFlow, by composing a normalizing flow with Gaussian mixture models. ProtoFlow (1) sets a new state-of-the-art in joint generative and predictive modeling and (2) achieves predictive performance comparable to existing prototypical neural networks while enabling richer interpretation.
This work was conducted jointly with MERL.
Publications
- "This Probably Looks Exactly Like That: An Invertible Prototypical Network,",,,,Proceedings of the European Conference on Computer Vision (ECCV),October 2024.[pdf] [code][bibtex]@InProceedings{Carmichael2024,
author = {Carmichael, Zachariah and
Redgrave, Timothy and
Cedre, Daniel Gonzalez and
Scheirer, Walter J},
title = {This Probably Looks Exactly Like That:
An Invertible Prototypical Network},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2024}
} - "Pixel-Grounded Prototypical Part Networks,",,,,,Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision
(WACV),January 2024.[pdf] [code][bibtex]@inproceedings{carmichael2024pixel,
title={Pixel-grounded Prototypical Part Networks},
author={Carmichael, Zachariah and
Lohit, Suhas and
Cherian, Anoop and
Jones, Michael J and
Scheirer, Walter J},
booktitle={Proceedings of the IEEE/CVF Winter Conference
on Applications of Computer Vision (WACV)},
pages={4768--4779},
year={2024}
}